
 ARDUINO
ARDUINO ESP8266
ESP8266 ESP32
ESP32 STM32
STM32 LuckFox / Teensy /
LuckFox / Teensy /
 DC MOTEUR ET DRAIVER
DC MOTEUR ET DRAIVER

 Communication RJ45 / GSM / GPS
Communication RJ45 / GSM / GPS Poids ⚖️ PRESION ⚖️ VIBRATION
Poids ⚖️ PRESION ⚖️ VIBRATION Capteur de Distance ProximitE et Vitesse 🏃🏻♂️📏
Capteur de Distance ProximitE et Vitesse 🏃🏻♂️📏 Capteur de Gaz et de PoussiEre 🔥💨☣️
Capteur de Gaz et de PoussiEre 🔥💨☣️ Capteurs Domotique 🏠
Capteurs Domotique 🏠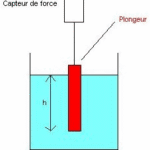 Capteur de Niveau 🎚️💧
Capteur de Niveau 🎚️💧 Capteur de lumiere 💡
Capteur de lumiere 💡 IMPRIMANTE 3D CNC Et Accessoires 🖨️
IMPRIMANTE 3D CNC Et Accessoires 🖨️ RC & DRONES 🚁
RC & DRONES 🚁












fiche technique complète et bien structurée pour le module que vous mentionnez, qui semble regrouper plusieurs concepts autour d’un encodeur rotatif numérique EC11, souvent utilisé avec un interrupteur poussoir intégré, un capuchon rotatif et parfois un module KY-040. Il est idéal pour les projets Arduino, ESP32, ou autres microcontrôleurs.
📘 Fiche Technique – Encodeur Rotatif Numérique EC11 (Module KY-040 / Contrôle 5V)
| 🔹 Caractéristique | ⚙️ Détail |
|---|---|
| 🏷️ Nom du composant | Encodeur rotatif numérique EC11 avec bouton-poussoir intégré |
| 🔩 Type de module | Module de lecture rotative (encodeur incrémental) + interrupteur |
| 📦 Nom du module (souvent) | KY-040 / Module EC11 / Module encodeur rotatif |
| 🔄 Fonction principale | Détection de rotation (gauche/droite) et appui bouton |
| 💡 Alimentation | 5V DC (compatible 3.3V selon MCU) |
| 🔌 Sorties | – CLK (impulsion) – DT (direction) – SW (bouton-poussoir) |
| 🔧 Type de signal | Signal numérique (quadrature A/B) + bouton |
| 📏 Résolution | Généralement 20 à 24 crans par tour (dépend de l’EC11) |
| 🖱️ Type de rotation | Incrémentale sans butée, continue |
| 🔘 Interrupteur intégré | ✅ Oui – bouton-poussoir central activé par pression |
| 📐 Dimensions typiques | ~25 × 30 mm pour le PCB KY-040 |
| 🧲 Fixation de l’axe | Capuchon (bouton rotatif) optionnel ou inclus |
| 🔩 Type d’axe | Axe cranté 6 mm (rond ou en D) |
| 🧰 Utilisation typique | Menus Arduino, réglages, contrôle de volume, navigation UI |
| 🖥️ Lecture par MCU | Facilement lisible via interruptions ou polling (Arduino, ESP32…) |
| 📦 Contenu d’un kit typique | – Module EC11 – Capuchon rotatif – Câble Dupont (parfois) |
🔌 Brochage standard du module KY-040
| Broche | Fonction |
|---|---|
| GND | Masse commune |
| VCC | Alimentation 5V ou 3.3V |
| CLK | Signal d’impulsion A |
| DT | Signal de direction B |
| SW | Bouton poussoir (LOW quand pressé) |
🧠 Fonctions typiques dans vos projets
| 🔧 Usage | ✅ Explication |
|---|---|
| Contrôle de menus | Naviguer dans des options OLED/LCD avec Arduino |
| Contrôle de volume | Rotation pour réglage, pression pour mute/pause |
| Interface homme-machine | Rotary UI, jog wheel, encodeur de précision |
| Réglages de PWM / LED | Ajustement de luminosité, vitesse moteur |
| Utilisation sans écran | Choix de mode ou calibration via LED + rotation |
💻 Exemple de lecture Arduino (code de base)
#define CLK 2
#define DT 3
#define SW 4
int lastStateCLK;
int counter = 0;
void setup() {
pinMode(CLK, INPUT);
pinMode(DT, INPUT);
pinMode(SW, INPUT_PULLUP);
Serial.begin(9600);
lastStateCLK = digitalRead(CLK);
}
void loop() {
int currentStateCLK = digitalRead(CLK);
if (currentStateCLK != lastStateCLK && currentStateCLK == LOW) {
if (digitalRead(DT) != currentStateCLK) {
counter++;
} else {
counter--;
}
Serial.print("Position: ");
Serial.println(counter);
}
lastStateCLK = currentStateCLK;
if (digitalRead(SW) == LOW) {
Serial.println("Bouton pressé");
delay(250); // Anti-rebond
}
}
🧩 Avantages
✅ Très faible coût
✅ Aucun ADC requis (tout en numérique)
✅ Longue durée de vie (pas d’usure mécanique comme un potentiomètre analogique)
✅ Parfait pour interfaces rotatives modernes












Avis
Il n’y a pas encore d’avis.