

 ARDUINO
ARDUINO ESP8266
ESP8266 ESP32
ESP32 STM32
STM32 LuckFox / Teensy /
LuckFox / Teensy /
 MEdical
MEdical Capteur de Distance ProximitE et Vitesse
Capteur de Distance ProximitE et Vitesse Capteurs Domotique
Capteurs Domotique Capteur de champ magnetique
Capteur de champ magnetique Capteur de Niveau
Capteur de Niveau Capteur de lumiere
Capteur de lumiere
 LCD Matrix LED
LCD Matrix LED OLED TFT
OLED TFT RJ45 / GSM / GPS
RJ45 / GSM / GPS Bluetooth /Radio / Lora
Bluetooth /Radio / Lora OUTILLAGE DE Mesurer
OUTILLAGE DE Mesurer Multimètre Oscilloscopes & Generateurs
Multimètre Oscilloscopes & Generateurs Matériel de soudage
Matériel de soudage Fers à souder et stations
Fers à souder et stations Accessoires de soudage
Accessoires de soudage
 Moteur AC et contrôleur
Moteur AC et contrôleur Moteur DC et contrôleur
Moteur DC et contrôleur Moteur pas à pas et contrôleur
Moteur pas à pas et contrôleur POMPE DEBITMETRE ELECTROVANNE
POMPE DEBITMETRE ELECTROVANNE
 CHARGEUR / ALIMENTATION A DECOUPAGE
CHARGEUR / ALIMENTATION A DECOUPAGE ALIMENTATION DE LABO
ALIMENTATION DE LABO BMS / PANNEAUX SOLAIRES / PILES ET ACCUS
BMS / PANNEAUX SOLAIRES / PILES ET ACCUS


")
")
")






















les cartes de développement de pilote de bus CAN, notamment celles basées sur les composants MCP2515, TJA1050, PCA82C250, ou SJA1000. Ces modules permettent d’ajouter une interface CAN (Controller Area Network) à des microcontrôleurs comme Arduino, ESP32, STM32, etc.
Paramètre:

Référence: MCP2515
Caractéristiques:

- Puce d’interface de contrôleur CAN TJA1050 embarquée
- La broche de la puce a été dérivation couramment utilisée, commodité pour la connexion
- Alimentation à broche 5v
- Taille de la carte PCB: 22mm x 11.5mm

Ce module est un module de communication CAN et une carte de développement CAN bus. Il a conduit la femme de ménage commune de la puce pour faciliter la connexion et l’utilisation.
Paramètres du produit
Tension d’alimentation: 5V
Puce embarquée: SJA100T, TJA1050
Description de l’interface:
A0-A7: broches de données
ALE: signal d’entrée
CS: Puce sélectionner l’entrée
RD: Signal de micro-contrôle RD
WR: Micro signal de contrôle WR
MOD: Entrée de sélection de mode
RST: réinitialiser l’entrée
VCC: tension d’entrée +
GND: tension d’entrée-
CANH: Bus CAN de haut niveau
CANL: Bus CAN de bas niveau


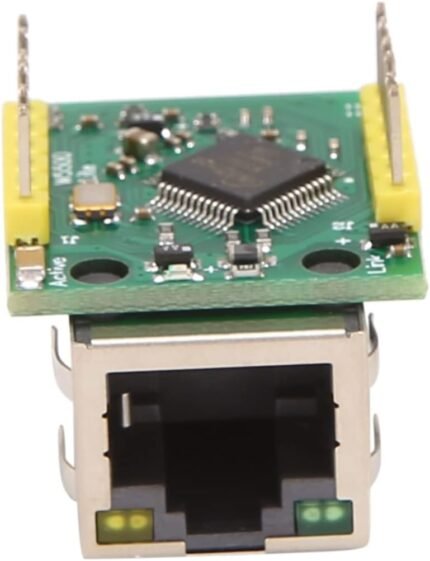
🧩 Module Bus CAN – MCP2515 + TJA1050 / PCA82C250 / SJA1000
🎯 Interface matérielle de communication série CAN (Controller Area Network) utilisée dans l’automobile, l’industrie, la robotique, etc.
📦 Description Générale
Les modules basés sur MCP2515 + TJA1050 / PCA82C250 sont des interfaces CAN complètes, prêtes à être utilisées avec des microcontrôleurs ne disposant pas de bus CAN natif.
Ils permettent la transmission et réception de données CAN selon la norme ISO 11898.
🔧 Le MCP2515 est un contrôleur CAN SPI.
🔌 Le TJA1050 / PCA82C250 / SJA1000 est un transceiver CAN (couche physique) — il adapte les niveaux logiques aux lignes CAN_H et CAN_L.
⚙️ Caractéristiques Techniques
| Composant | Fonction | Description |
|---|---|---|
| MCP2515 | Contrôleur CAN | Interface SPI (3.3V/5V) vers CAN |
| TJA1050 / PCA82C250 | Transceiver CAN | Convertit les signaux CAN logiques en bus CAN physique |
| SJA1000 | Contrôleur autonome (alternative au MCP2515) | Parfois utilisé dans des versions industrielles |
| Alimentation | 5V (certains modèles avec régulateur 3.3V) | Alimente MCP2515 et le transceiver |
| Interface µC | SPI (SCK, MOSI, MISO, CS, INT) | 8 MHz max |
| Vitesse CAN | Jusqu’à 1 Mbit/s | Dépend de la configuration (bit timing) |
| Broches CAN | CAN_H / CAN_L | Lignes différentielles |
| Connectique | Broches 2,54 mm ou bornier à vis | Selon modèle |
🧰 Applications
| 🚗 Automobile | Diagnostic OBD-II, communication ECU ↔ capteurs |
| 🏭 Industrie | Automates, réseaux de terrain (CANOpen) |
| 🤖 Robotique | Contrôle moteur, capteurs sur bus partagé |
| 🔗 Projets Arduino | Réseaux distribués (ex. 2 Arduino + CAN) |
| 🛰️ Aéronautique / ferroviaire| Réseaux sécurisés à haute intégrité |
📘 Comparaison entre transceivers CAN
| Transceiver | Tension | Débit max | Avantages |
|---|---|---|---|
| TJA1050 | 5V | 1 Mbps | Commun, stable, très compatible |
| PCA82C250 | 4.75–5.25V | 1 Mbps | Robuste, bonne immunité CEM |
| SN65HVD230 | 3.3V | 1 Mbps | Parfait pour ESP32 et STM32 3.3V |
| SJA1000 | 5V | 1 Mbps | Contrôleur autonome, plus ancien |
✅ Avantages
-
🔧 Facile à interfacer via SPI
-
🔁 Communication bidirectionnelle fiable
-
📦 Compatible Arduino, ESP32, STM32…
-
🚘 Protocole standard utilisé dans tous les véhicules
-
🧠 Large support logiciel (librairies Arduino :
mcp_can.h,CAN.h, etc.)
🧾 Conclusion
Les modules MCP2515 + TJA1050 ou PCA82C250 offrent une solution fiable, économique et puissante pour ajouter le support du bus CAN à tout microcontrôleur. Que ce soit pour de la communication entre cartes, des applications embarquées, ou l’intégration dans des réseaux industriels, ces cartes sont incontournables pour l’interfaçage CAN.














Avis
Il n’y a pas encore d’avis.